We know that in embedded sector mostly used protocol is Can and modbus so In this article we will see Basic difference between can bus vs modbus protocol | communication.
Table of Contents
Basic CAN bus communication protocol
- ●CAN stands for controller area network.
- ●It was developed by BOSCH in1986.
- ●It does not require a host (master device) to communicate.
- ●It is a broadcast type of bus.
- ●It is a message based protocol.
- ●It has a serial half-duplex asynchronous communication.
- ●It is widely used in cars for communication between devices like airbag,headlight sensor,seatbelt sensor etc.
- ●Device are controlled based on priority (device address)

Basic of MODBUS communication :
- ●Oldest and popular automation protocol in process automation SCADA (supervisory control and data acquisition).
- ●Modbus was published by Modicon in 1979.
- ●It requires a host.
- ●It is not a broadcast type of bus.
- ●It has both half-duplex and full-duplex.
- ●It is use in ethernet ,RS-232,RS-485,RS-422.
- ●It is used in IOT ,PC,human machine interface
Also read: Modbus communication type
Some important point about MODBUS protocol
●Oldest and popular automation protocol in process automation SCADA (supervisory control and data acquisition).
●Modbus was published by Modicon in 1979.
●It requires a host.
●It is not a broadcast type of bus.
●It has both half-duplex and full-duplex.
●It is open standard and most of the devices are compatible,many companies use this protocol for communication.
●In the modbus network there exist a master and upto 247 slaves.
● Modbus master is the device which requests and writes information.
●Modbus slave is the device connected to the bus having a master to supply information.
●Each slave is assigned a unique address from 1 to 247.
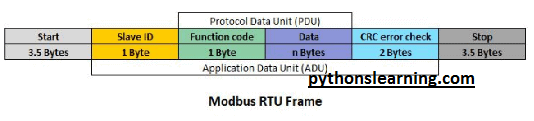
●Start byte shows the start of the frame.
●Slave id is the unique id given to slave devices.
●Function code is the bits which tell operations to be performed by a master device like read,write etc.it is user defined.
●Data is user defined.
●CRC is a cyclic redundancy check for error while data transmission.
●Stop byte shows the end of the frame.
Summary:
In this article we saw some basic concept about modbus and CAN protocol so about this article you have any question then free to ask me.
Basic difference between CAN and modbus protocol
1.CAN is a multi-master protocol while Modbus is a master-slave protocol.
2.CAN is message-based while Modbus is request-response based.
3/CAN is used in automotive and industrial control systems while Modbus is mainly used in building automation and industrial control systems.
Basic differences between SNMP and Modbus protocol
1.SNMP (Simple Network Management Protocol) is used for managing and monitoring network devices, while Modbus is used for communication between devices in industrial automation and control systems.
2. SNMP is based on a client-server model, while Modbus is a master-slave protocol.
3. SNMP is used primarily in networking, while Modbus is used primarily in industrial automation and control systems.
Basic differences between Modsim and Modscan
1. Modsim is a tool for simulating Modbus devices, while Modscan is a tool for testing and debugging Modbus-based systems.
2. Modsim allows users to create and configure virtual Modbus devices, while Modscan allows users to send and receive Modbus messages and monitor Modbus communication.
3. Modsim is primarily used for testing and development, while Modscan is primarily used for troubleshooting and debugging.

