Basics of pointer in embedded c
Basics of pointer in embedded c
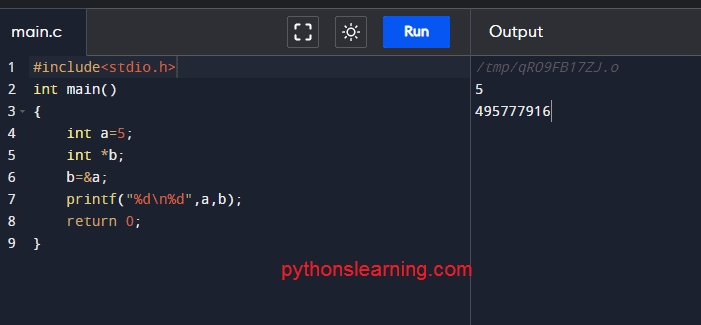
The pointer in c language is a variable which can be store the address of another variable. int n=10; int *p=&n; Declaration a pointer in embedded might you also like…
Welcome to pythonslearning | python tutorials point . In this blog category we will learn Different embedded concepts.
The pointer in c language is a variable which can be store the address of another variable. int n=10; int *p=&n; Declaration a pointer in embedded might you also like…
There are two methods to he data into the function in embedded c Call by value Call by reference call by reference in embedded c Call by reference in embedded…
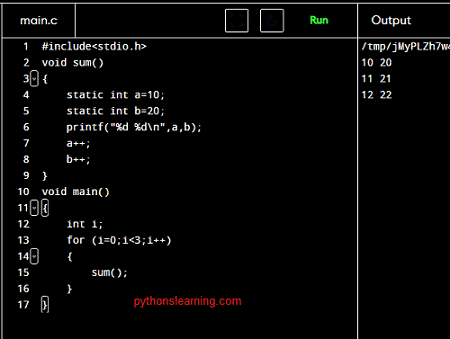
We know that storage classes in embedded c are used to determine the visibility, lifetime , memory location and initial value of a variable. There are four type of storage…

Intro: We know that SPI stands for the Serial Peripheral Interface. SPI developed by Motorola in the mid-1980.It is a one of the serial communication protocol for connect low-speed devices.It…
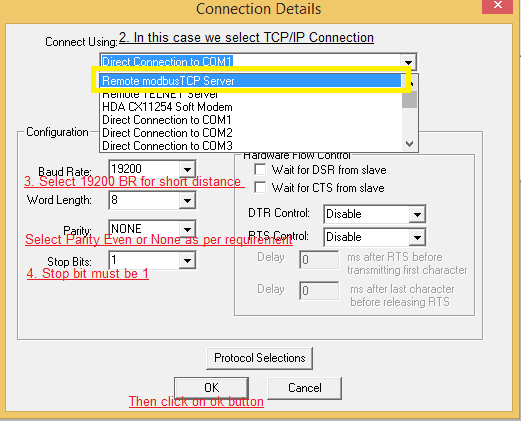
We know that importance of can and modbus protocol. if you don't know about this communication protocol then click on hyperlink. Modbus Protocol Device is a service that provides a…
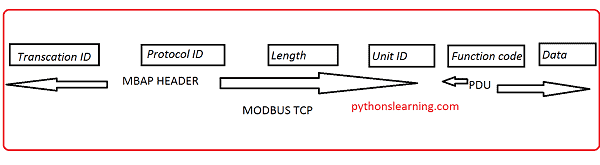
In the previous article we saw basics of modbus communication so in this article we will learn which is basic modbus communication type in embedded System. Modbus is a widely…
We know that most of the real time application supported python languages so in this article we will see some real time embedded projects. But why we use python with…

In this article we will see Top 10 RTOS interview questions with answers in 2021 so Let's see: 1) Explain in detailed what is embedded system ? An embedded system…
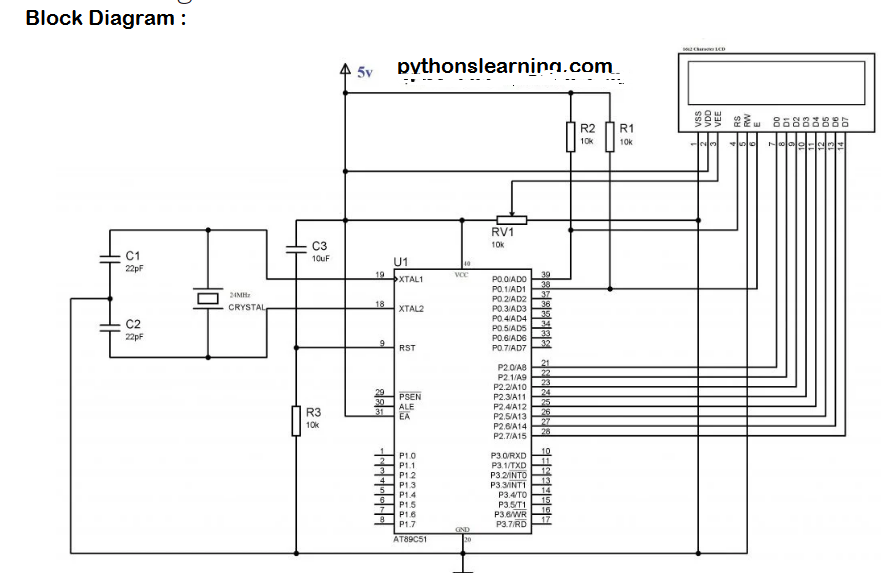
We know that Liquid Crystal Display (LCD) is a mostly used electronic display module and having a wide range of applications such as Timer, mobile phones, calculators, laptops, etc. 16×2…
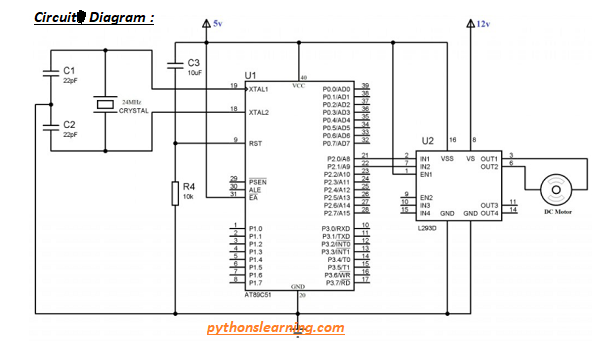
We know that in engineering life we used DC motor with 8051 microcontroller so For the beginner one question is Commonly ask How to connect DC motor to controller ?or…